


>> Click Here << to download the paper I presented at the Florida Conference on Recent Advances in Robotics (FCRAR) 2011.
Look Mom! No score!
The musical counterpoint generated by MIRAG is based on algorithms I programmed informed by Harold Owen's book, Modal and Tonal Counterpoint. Currently, it plays 3-voice counterpoint in second species. My aim is to expand it to 4 or 5 voices and achieve 4th species in the future.
MIRAG | Musically Intelligent Robotic Algorithmic Guitar
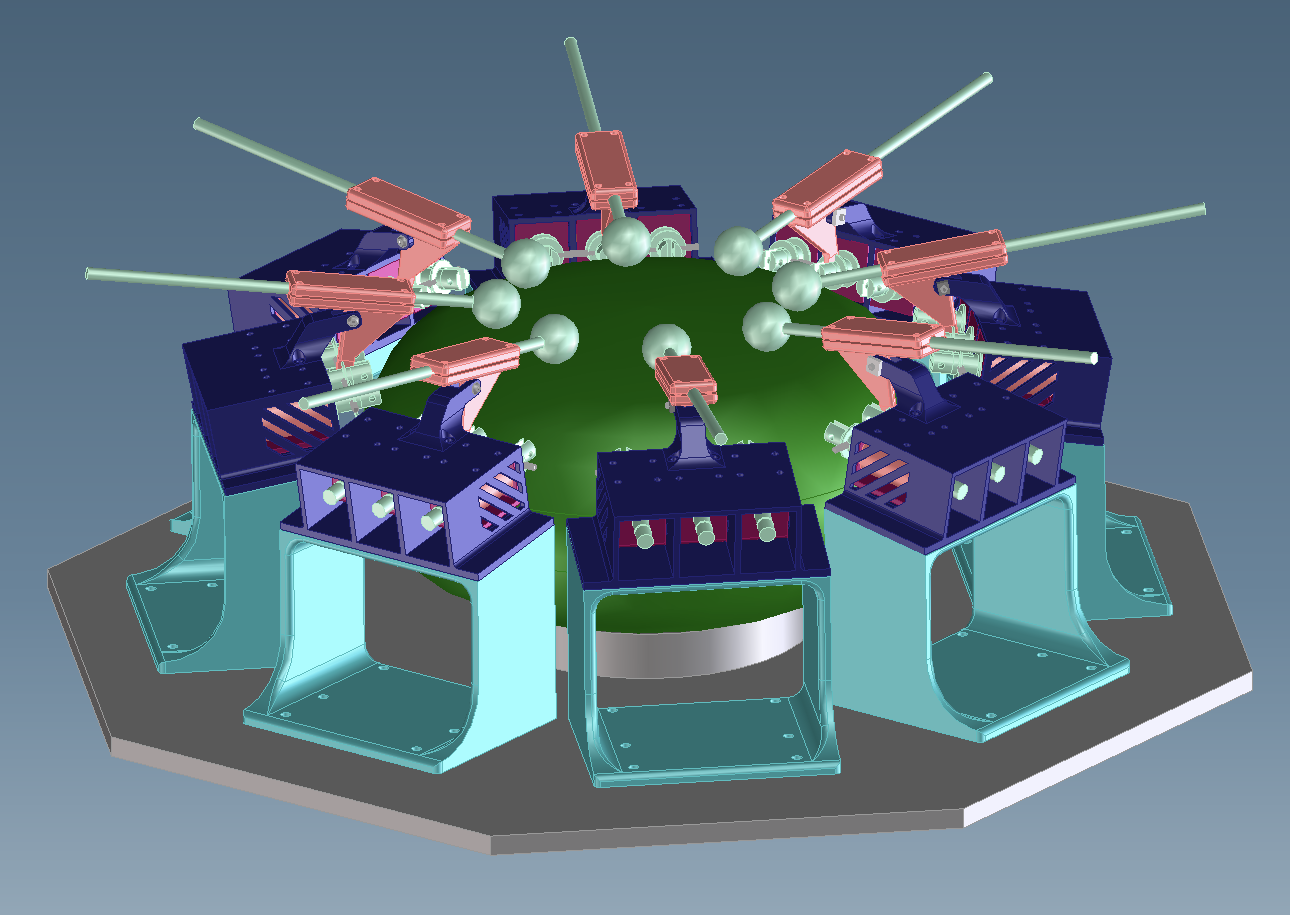
My aim for this project was to construct a stationary <em>musically</em> intelligent robot with the following components:
play 3 separate guitar strings - i.e. monochords. Specifically, the scale length and strings are from a Brazilian folk guitar called the Viola Caipira.
Sensors: it senses its environment by means of sonar (people proximity) and photo resistors (ambient light). It has, for its special sensor, an Apple iSight camera that is wired to a computer for color and motion matrix analysis, which is then broadcasted via Nordic RF transceivers to the robot.
Intelligence: The robot will take the above sensor data and use this to inform parameters that will effect musical improvisations. For instance, color will effect parameters for scale-type (Blue = Lydian, Green = Dorian, Red = Hungarian Minor) and a photo resistor determines the tempo of performance. An MSP 430 processor is dedicated solely to this task and will compile packets of Note-on/off information to send to the actuator processors I call the reflexes.
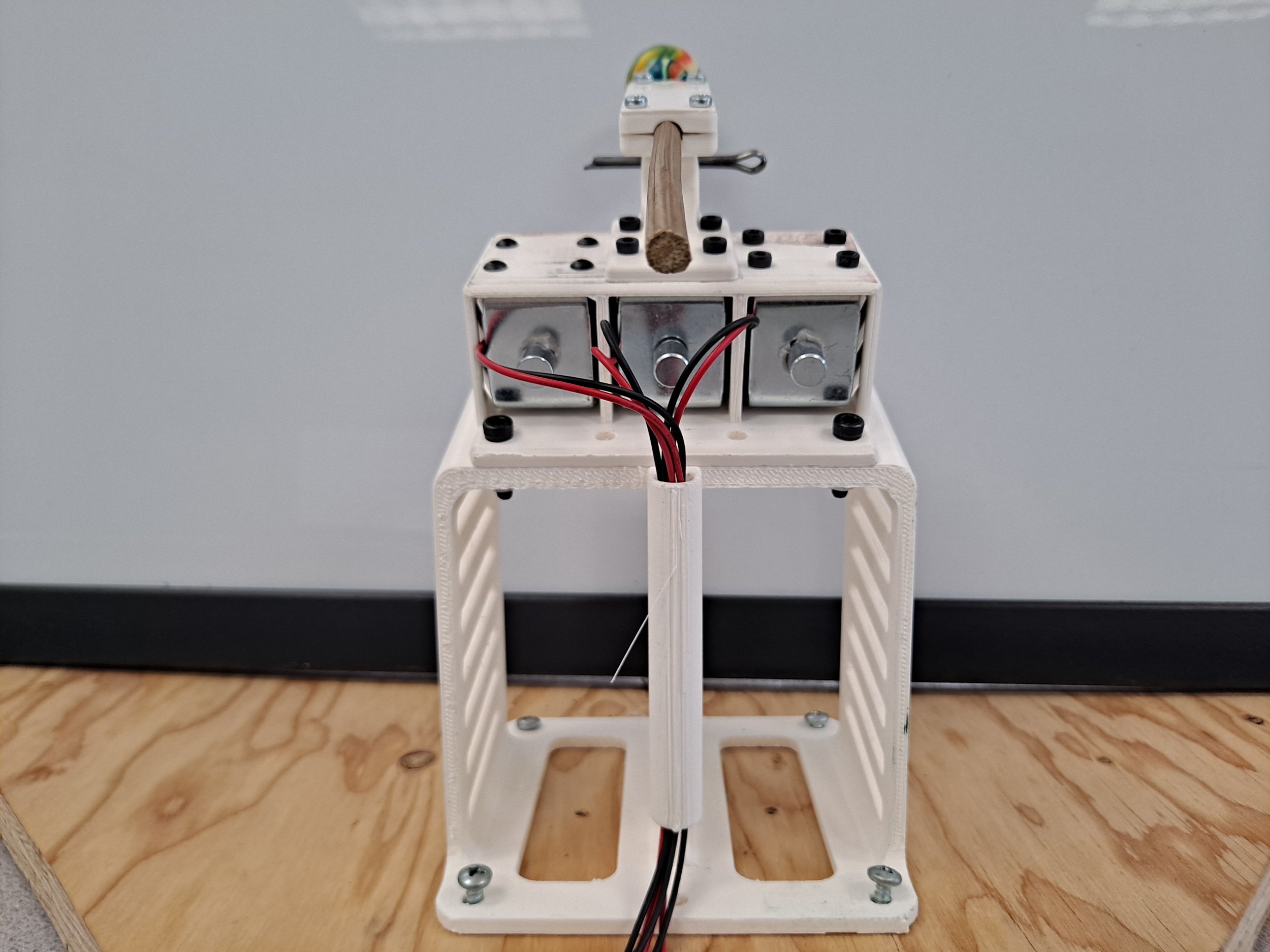
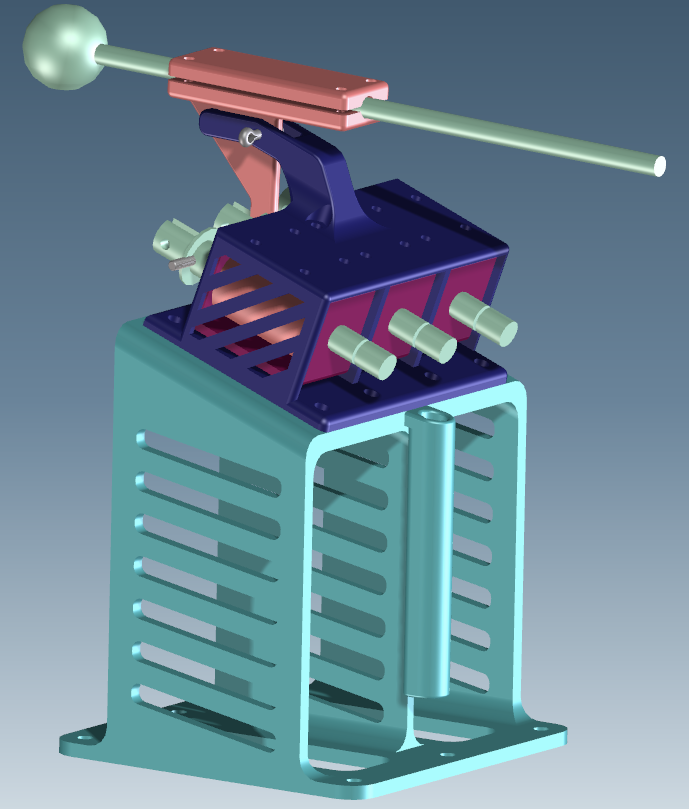
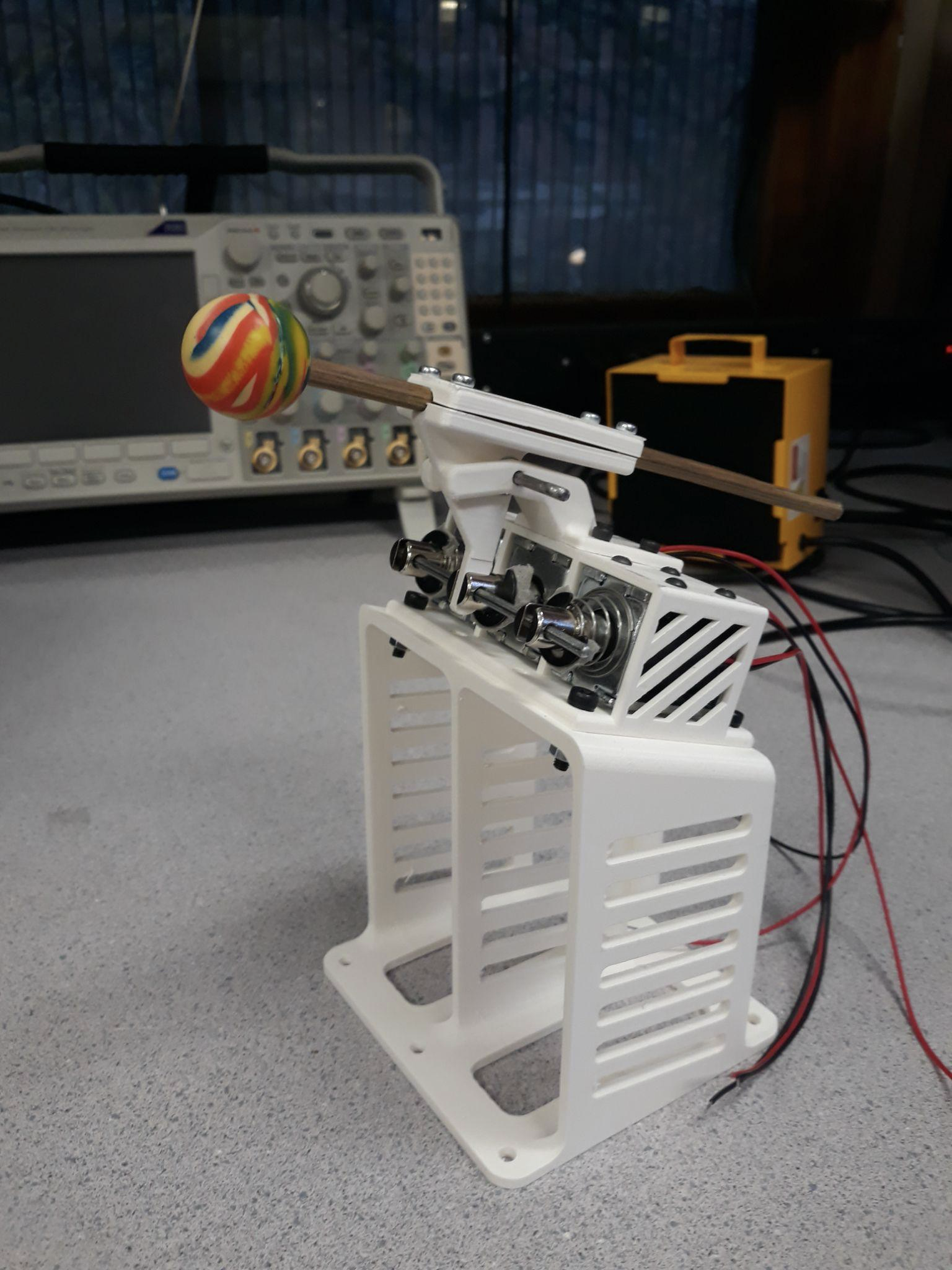
Actuation: The music packets are sent via SPI to the reflex processors that handle control of the servos and stepper motor drivers. For each string: 1 servo picks the string back and fourth, 1 servo with a felt tip dampens the string, a stepper motor drives a belt up and down parallel to the string. On the belt is clamped a small dowel or rod that "nodes" the string in that given position - controlling the pitch of the string. This scheme results in interesting musical control as not only are discrete pitches possible, but also sliding from one pitch to another (glissando), oscillating around a given pitch (vibrato), and playing notes not in a tempered scale (alternative-non-western tunings). Bump switches are attached to Fret 0 of each monocord that detect when a reflex has successfully calibrated itself on startup to let the "Brain" know it is ready to perform.
Amplification: a small rare earth magnet glued to the top of a 33mH inductor mounted under the strings of each monocord is input to a mixer and amplified so one can hear better the music it plays. The amplified signals can also be sent to a speaker, driving non-Newtonian fluid. This visualizes the sound of the strings as the patterns of the fluid change to represent different wave forms.
Resonators: A collaboration with Sculpture/Composition student, Paul Pino, resulted in new monocord construction in the Fall '11 semester. The resonators are cut from Plexiglas and Steel using a laser cutter. The electronic component of the monocords are mounted onto these transparent new resonators. Special Thanks, Paula!
Given this system, through human interaction it will be possible to predict the behavior of this robot under specific circumstances, but all music heard is generated on-the-fly and not predetermined. It is part sonification of its environmental data and part musical improvisation.
Hydra: Chester Udell & Paula Pino
The MIRAG was integrated into a project for the University of Florida's Transdisciplinary seminar: a graduate course integrating Graduate Composition, Digital Media, and Sculpture students. The collaborative efforts with Composer/Sculpture student, Paul Pino, resulted in new monocord resonators for the MIRAG built using Plexiglas, steel, and a laser cutter. The sound from the MIRAG is amplified, transposed down 2 octaves using realtime FFT, and sent to a subwoofer driving non-Newtonian fluid (designed by Paul Pino). This creates a realtime visualization in the fluid's wave patterns of what the MIRAG is playing. The cohesive system results in what we call <em>the Hydra</em>,the mythological three-headed water serpent.